
Deepsea Challenger -Deepsea Challenger
 Desenarea DCV1, pe baza imaginilor de pe site-ul web Deepsea Challenger (nu la scară)
|
|
| Istorie | |
|---|---|
|
| |
| Nume | Deepsea Challenger |
| Constructor | Acheron Project Pty Ltd. |
| Lansat | 26 ianuarie 2012 |
| În funcțiune | 2012 |
| stare | Activ din 2018 |
| Caracteristici generale | |
| Tip | Vehicul cu scufundare profundă |
| Deplasare | 11,8 tone |
| Lungime | 7,3 m (24 ft) |
| Putere instalată | motor electric |
| Propulsie | 12 propulsoare |
| Viteză | 3 noduri (5,6 km / h; 3,5 mph) |
| Rezistență | 56 de ore |
| Adâncimea testului | 11.000 m (36.000 ft) |
| Completa | 1 |
Deepsea Challenger (DCV 1) este un submersibil de scufundare de 7,3 metri (24 ft)conceput pentru a ajunge la fundul Challenger Deep , cel mai adânc punct cunoscut de pe Pământ. La 26 martie 2012, regizorul canadian James Cameron a pilotat ambarcațiunea pentru a atinge acest obiectiv în cea de-a doua scufundare pilotată care a ajuns la Challenger Deep. Construit în Sydney , Australia de compania de cercetare și proiectare Acheron Project Pty Ltd, Deepsea Challenger include echipamente științifice de eșantionare și camere 3D de înaltă definiție; a ajuns la cel mai adânc punct al oceanului după două ore și 36 de minute de coborâre de la suprafață.
Dezvoltare
Deepsea Challenger a fost construit în Australia, în parteneriat cu National Geographic Society și cu sprijinul Rolex , în cadrul programului Deepsea Challenge. Construcția submersibilului a fost condusă de inginerul australian Ron Allum . Mulți dintre membrii echipei de dezvoltatori submersibili provin din frăția de scufundări în peșteră din Sydney, inclusiv însuși Allum, cu o experiență de mulți ani în scufundări în peșteri.
Lucrând într-un mic atelier de inginerie din Leichhardt , Sydney, Allum a creat materiale noi, inclusiv o spumă sintactică structurală specializată numită Isofloat, capabilă să reziste forțelor de compresie uriașe la adâncimea de 11 kilometri (6,8 mi). Noua spumă este unică prin faptul că este mai omogenă și are o rezistență uniformă mai mare decât alte spume sintactice disponibile în comerț, dar cu o densitate specifică de aproximativ 0,7, va pluti în apă. Spuma este compusă din sfere de sticlă goale foarte mici suspendate într-o rășină epoxidică și cuprinde aproximativ 70% din volumul submarinului.
Rezistența spumei a permis proiectanților Deepsea Challenger să încorporeze motoare de propulsie ca parte a infrastructurii montate în spumă, dar fără ajutorul unui schelet de oțel pentru a monta diferite mecanisme. Spuma înlocuiește rezervoarele umplute cu benzină pentru flotație, așa cum este folosit în batiscaful istoric Trieste .
Allum a construit, de asemenea, numeroase inovații, necesare pentru a depăși limitările produselor existente (și în prezent în curs de dezvoltare pentru alte vehicule de mare adâncime). Acestea includ propulsoarele umplute cu ulei echilibrate sub presiune; Tablouri de iluminat cu LED-uri; noi tipuri de camere; și cabluri de comunicație de penetrare rapide și fiabile care permit transmisiuni prin corpul submersibilului. Allum a câștigat o mare parte din experiența sa dezvoltând comunicarea electronică utilizată în scufundările Titanic ale lui Cameron la filmarea Ghosts of the Abyss , Bismarck și alții.
Sistemele de alimentare pentru submarin erau furnizate de baterii cu litiu care erau adăpostite în spumă și pot fi văzute clar în fotografiile publicitare ale navei. Sistemele de încărcare a bateriei cu litiu au fost proiectate de Ron Allum. Submersibilul conține peste 180 de sisteme la bord, inclusiv baterii, propulsoare, suport de viață, camere 3D și iluminare cu LED-uri. Aceste sisteme interconectate sunt monitorizate și controlate de un controler de automatizare programabil (PAC) de la producătorul de comenzi Opto 22 din Temecula, California . În timpul scufundărilor, sistemul de control a înregistrat, de asemenea, adâncimea, poziția, temperatura, presiunea, starea bateriei și alte date și le-a trimis la nava de sprijin la intervale de trei minute printr-un sistem de comunicație acustică subacvatic dezvoltat de compania australiană de vest L-3 Nautronix .
Elementele structurale cruciale, cum ar fi coloana vertebrală și sfera pilot care l-au purtat pe Cameron, au fost proiectate de compania tasmaniană Finite Elements. Proiectarea interiorului sferei, inclusiv protecția împotriva incendiilor, gestionarea condensului și montarea ansamblurilor de control, a fost realizată de consultanța de proiectare industrială din Sydney Design + Industry.

Specificații
Submersibilul are o sferă pilot de 1,1 metri (43 in) în diametru, suficient de mare pentru un singur ocupant. Sfera, cu pereți de oțel de 64 mm (2,5 in) grosime, a fost testată pentru capacitatea sa de a rezista la 114 megapascali necesari (16.500 de lire pe inch pătrat ) de presiune într-o cameră de presiune de la Universitatea de Stat din Pennsylvania . Sfera se află la baza vehiculului de 11,8 tone (13,0 tone ). Vehiculul funcționează în poziție verticală și transportă 500 kg (1.100 lb) de greutate de balast care îi permite să se scufunde atât în partea de jos, cât și când este eliberat, să se ridice la suprafață. Dacă sistemul de eliberare a greutății balastului eșuează, blocând ambarcațiunea pe fundul mării, o eliberare galvanică de rezervă este concepută pentru a se coroda în apă sărată într-o perioadă de timp stabilită, permițând ca suprafața să iasă automat la suprafață. Deepsea Challenger are mai puțin de o zecime din greutatea predecesorului său de cincizeci de ani, batiscaful Trieste ; vehiculul modern transportă, de asemenea, un echipament științific mult mai mare decât Trieste și este capabil de urcare și coborâre mai rapide.

Balize și antene, sus
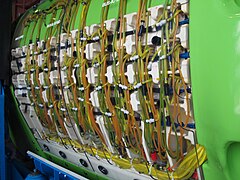
Set de baterii.

Unul din propulsori.

Una dintre cele două greutăți principale de balast.

Sfera pilot înainte de instalare.

Hatch și fereastră de vizualizare.

Sferă pilot, interior.







Scufundări
Scufundări timpurii
La sfârșitul lunii ianuarie 2012, pentru a testa sistemele, Cameron a petrecut trei ore în submersibil în timp ce era scufundat chiar sub suprafața din Sydney Naval Yard din Australia. La 21 februarie 2012, o scufundare de testare destinată să atingă o adâncime de peste 1.000 m (3.300 ft) a fost întreruptă după doar o oră din cauza problemelor cu camerele și sistemele de susținere a vieții . La 23 februarie 2012, chiar lângă Insula Noua Britanie , Cameron a dus cu succes submersibilul la fundul oceanului la 991 m (3.251 ft), unde a făcut o întâlnire cu un vehicul galben de la distanță operat de pe o navă de deasupra. La 28 februarie 2012, în timpul unei scufundări de șapte ore, Cameron a petrecut șase ore în submarin la o adâncime de 3.700 m (12.100 ft). Fluctuațiile sistemului energetic și curenții neprevăzuți au prezentat provocări neașteptate.
La 4 martie 2012, o scufundare record la mai mult de 7.260 m (23.820 ft) sa oprit în partea de jos a tranșei New Britain, când problemele cu propulsoarele verticale l-au determinat pe Cameron să revină la suprafață. Zile mai târziu, odată cu rezolvarea problemei tehnice, Cameron a dus cu succes submersibilul la fundul tranșei New Britain, atingând o adâncime maximă de 8.221 m (26.972 ft). Acolo, a găsit o câmpie largă de sedimente libere , anemone , meduze și habitate variate în care câmpia se întâlnea cu pereții canionului.
Challenger Deep
La 18 martie 2012, după ce a părăsit zona de testare din Marea Solomon relativ calmă , submersibilul se afla la bordul navei de suprafață Mermaid Sapphire , ancorat în portul Apra , Guam, în curs de reparații și modernizări și așteptând un ocean suficient de calm pentru a efectua picaj. Până la 24 martie 2012, după ce a părăsit portul din Guam cu câteva zile mai devreme, submarinul se afla la bordul uneia dintre cele două nave de suprafață care plecaseră din atolul Ulithi spre Challenger Deep.
La 26 martie 2012, sa raportat că a ajuns la fundul tranșei Mariana .


Coborârea, de la începutul scufundării până la sosirea pe fundul mării, a durat două ore și 37 de minute, aproape de două ori mai rapid decât coborârea din Trieste. Un ceas Rolex, „purtat” pe brațul robot al submarinului, a continuat să funcționeze normal pe tot parcursul scufundării. Nu toate sistemele au funcționat conform planificării la scufundare: aterizatorii care transportă momeala nu au fost aruncați înainte de scufundare, deoarece sonarul necesar pentru a le găsi pe fundul oceanului nu funcționa, iar problemele sistemului hidraulic au împiedicat utilizarea echipamentelor de prelevare a probelor. Cu toate acestea, după aproximativ trei ore pe fundul mării și o ascensiune reușită, a fost planificată explorarea ulterioară a Challenger Deep cu unitatea unică pentru mai târziu în primăvara anului 2012.
Înregistrări
Pe 26 martie 2012, Cameron a ajuns în partea de jos a Challenger Deep, cea mai adâncă parte a tranșei Mariana . Adâncimea maximă înregistrată în timpul acestei scufundări de înregistrare a fost de 10.908 metri (35.787 ft). Măsurată de Cameron, în momentul aterizării, adâncimea era de 10.898 m (35.756 ft). A fost a patra scufundare vreodată la Challenger Deep și a doua scufundare cu echipaj (cu o adâncime maximă înregistrată puțin mai mică decât cea a scufundării din Trieste din 1960). A fost prima scufundare solo și prima care a petrecut o cantitate semnificativă de timp (trei ore) explorând fundul.
Evenimente ulterioare
Deepsea Challenger a fost donat Instituției Oceanografice Woods Hole pentru studiile soluțiilor sale tehnologice, pentru a încorpora unele dintre aceste soluții în alte vehicule pentru a avansa cercetarea în adâncime. La 23 iulie 2015, a fost transportat de la Woods Hole Oceanographic Institution la Baltimore pentru a fi expediat în Australia pentru un împrumut temporar. În timp ce se afla într-un camion plat pe autostrada Interstate 95 din Connecticut, camionul a luat foc, ducând la deteriorarea submersibilului. Cauza probabilă a incendiului a fost din cauza defecțiunii frânei camionului, care a aprins anvelopele din spate. Oficialii pompierilor din Connecticut au speculat că a fost o pierdere totală pentru Deepsea Challenger ; cu toate acestea, amploarea efectivă a prejudiciului nu a fost raportată. Submersibilul a fost transportat înapoi la Woods Hole Oceanographic Institution după incendiu. Din februarie 2016, a fost mutat în California pentru reparații.
Eforturi similare
Începând din februarie 2012, alte câteva vehicule sunt în curs de dezvoltare pentru a atinge aceleași adâncimi. Grupurile care le dezvoltă includ:
- Triton Submarines , o companie din Florida care proiectează și produce submarine private, al cărei vehicul, Triton 36000/3 , va transporta un echipaj de trei persoane pe fundul mării în 120 de minute.
- Virgin Oceanic , sponsorizat de Richard Branson lui Virgin Group , este în curs de dezvoltare un submersibil proiectat de Graham Hawkes , DeepFlight Challenger , cu care pilotul solo va avea 140 de minute pentru a ajunge pe fundul mării.
- DOER Marine , un San Francisco Bay Area companie de tehnologie marină bazată înființată în 1992, care este în curs de dezvoltare un vehicul, Deepsearch (și Ocean Explorer HOV nelimitat ), cu unele sprijin din partea Google a lui Eric Schmidt , cu care va avea un echipaj format din două sau trei 90 de minute pentru a ajunge la fundul mării, ca program Deep Search .
Vezi si
- Expediție Challenger - Expediție de cercetare oceanografică (1872–1876)
- Explorarea în adâncime - Investigarea condițiilor fizice, chimice și biologice de pe fundul mării
- Cronologia tehnologiei scufundărilor - Listă cronologică a evenimentelor notabile din istoria echipamentelor de scufundare subacvatică
Referințe
linkuri externe
-
 Medii legate de Deepsea Challenger la Wikimedia Commons
Medii legate de Deepsea Challenger la Wikimedia Commons -
Site oficial

- Articol despre utilizarea dinamicii computerizate a fluidelor în timpul procesului de proiectare a Deepsea Challenger
- Video NGS: întoarcerea lui Cameron de la Challenger Deep
- Deepsea Challenge 3D la IMDb , un documentar 2014 al National Geographic Channel .